Abstract
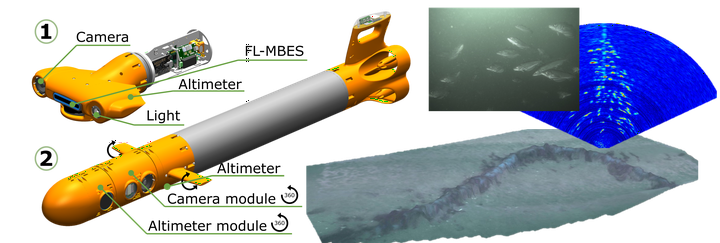
In this work, we present the SeaShark AUV; a modular, easily configurable, one-man portable micro-AUV. The SeaShark AUV is conceived as modular parts that fit around a central main tube, which holds battery and other vital parts. The head unit comprises easy exhangeable, stackable, and 360 degree rotatable payload sections to quickly obtain a suitable configuration for many objectives. We employ navigation no better than dead reckoning or relative navigation with respect to some well-known structure, and thus aim at underwater activities that do not require highly accurate geo-referenced data-points. Operating the SeaShark AUV requires only the vehicle itself and a tablet for mission planning and post-mission review. We have built several complete SeaShark systems and have begun exploring the many possibilities and use-cases in both research and commercial use. Here we present a comprehensive overview and introduction to our AUV and operation principles, and further show data examples for experimental operations for shore-to-sea bio-habitat mapping and in-harbor wall and pier inspection.